Tangentialebene

Die Tangentialebene in einem Punkt an eine Fläche im dreidimensionalen Raum ist diejenige Ebene, die die Fläche in der Umgebung des Punktes am besten annähert (berührt). Sie ist damit die zweidimensionale Entsprechung zur Tangente einer Kurve. Wie im Fall der Kurve existiert eine Tangentialebene nur, wenn die Fläche hinreichend „glatt“ ist. Dies gilt zum Beispiel für die Graphen von differenzierbaren Funktionen von zwei Variablen. Eine Fläche, die einen Knick oder eine Spitze hat – zum Beispiel ein Kegel – besitzt in diesen Punkten keine Tangentialebene.


Eine Ebene ist durch einen Punkt (in diesem Fall der Berührpunkt ) und zwei linear unabhängige Richtungsvektoren oder durch einen Punkt und einen Normalenvektor bestimmt. Je nachdem, wie eine gegebene Fläche beschrieben wird (implizit, explizit oder parametrisiert, s. u.) wird man entweder Richtungsvektoren oder einen Normalenvektor bestimmen.
Die Tangentialebene bildet den zweidimensionalen Spezialfall eines Tangentialraums einer Untermannigfaltigkeit des .

Formale Definition
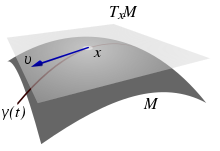
Es sei eine reguläre Fläche und ein Punkt.


Die Tangentialebene an im Punkt ist die Ebene durch , die von den Geschwindigkeitsvektoren von durch verlaufenden Wegen aufgespannt wird: Ist die Funktion ein Weg mit , so ist ein Punkt der Tangentialebene. Da die Tangentialebene zweidimensional ist, genügen zwei solcher Wege (in verschiedene Richtungen), um die Tangentialebene aufzuspannen.





Konvexe Fläche
Mit Hilfe der Tangentialebene ist außerdem der Begriff der konvexen Fläche definiert: Eine Fläche heißt dann konvex, wenn in jedem ihrer Punkte eine Umgebung existiert, für die alle Punkte der Umgebung auf einer Seite der Tangentialebene liegen.[1]
Tangentialebene an den Graphen einer Funktion

Die Fläche ist als Graph

einer Funktion von zwei Veränderlichen gegeben. Gesucht ist die Tangentialebene an die Fläche in einem Punkt . Falls die Funktion an der Stelle differenzierbar ist mit den partiellen Ableitungen , liefert das Taylorpolynom erster Ordnung






eine Gleichung der gesuchten Tangentialebene. Die Tangentialebene ist somit der Graph der affin-linearen Funktion
- .

Beispiel: Die Fläche (ein Paraboloid) ist gegeben als Graph der Funktion mit . Es sei . Mit und ergibt sich




- bzw.


als Gleichung der gesuchten Tangentialebene im Flächenpunkt .

Tangentialebene an eine implizit gegebene Fläche

In diesem Fall ist die Fläche als Niveaufläche

einer Funktion von 3 Variablen gegeben. Zum Beispiel ist die Einheitskugel durch die Gleichung

gegeben. Es sei ein Punkt der Fläche d. h. es ist . Falls im Punkt differenzierbar ist und



gilt, so wird die Tangentialebene im Punkt durch die Gleichung


dargestellt. Begründung: Der Vektor zeigt in die Richtung der stärksten Zunahme von und muss damit ein Normalenvektor der gesuchten Tangentialebene sein.

Beispiel: Die Fläche ist ein Ellipsoid mit der Gleichung
- ,

gesucht ist die Tangentialebene von im Punkt . Es gilt und die gesuchte Tangentialebene hat die Koordinatengleichung


- bzw.
- .


Tangentialebene einer parametrisierten Fläche

In diesem Fall ist die Fläche durch eine Parameterdarstellung gegeben. Ist die Parameterdarstellung in einem Parameterpunkt differenzierbar und sind die Ableitungsvektoren linear unabhängig, so ist





eine Parameterdarstellung der Tangentialebene im Punkt .

Beispiel: ist eine Parameterdarstellung des Affensattels. Mit und ergibt sich für die Tangentialebene in einem beliebigen Punkt



- .

Bemerkung: Das Beispiel des Affensattels zeigt, dass eine Fläche durchaus auf mehrere Möglichkeiten dargestellt werden kann: 1) parametrisiert wie hier eingeführt, 2) als Graph der Funktion und schließlich 3) implizit durch .


Schnitt einer Tangentialebene mit der Fläche
Es gibt Flächen, die in der Nähe eines Punktes auf einer Seite der Tangentialebene in diesem Punkt liegen. Z.B.: Paraboloid und Ellipsoid (s. o.) oder Zylinder. Allerdings ist es auch möglich, dass die Fläche in der Nähe eines Punktes auf beiden Seiten der Tangentialebene in diesem Punkt liegt. Z.B. Affensattel oder hyperbolisches Paraboloid. Ist die Gauß-Krümmung in einem Flächenpunkt nicht Null, so gilt: bei positiver Gaußkrümmung tritt der erste Fall (Fläche auf einer Seite) und bei negativer Gaußkrümmung der zweite Fall (Fläche auf beiden Seiten) ein. Ist die Gaußkrümmung Null, so sind beide Fälle möglich. Z.B.: Zylinder überall oder Affensattel im Nullpunkt.
Anwendungen
Überall, wo die Beschreibung einer Fläche für Berechnungen zu kompliziert ist, verwendet man Tangentialebenen als Ersatz für die gegebene Fläche, z. B. bei
- der Bestimmung von Punkten der Schnittkurve zweier Flächen (Newton-Verfahren),
- der Bestimmung von Umrisspunkten einer Fläche: Die Projektionsrichtung liegt in der Tangentialebene eines Umrisspunktes,
- Abbildungen (Projektionen von Flächen auf eine Ebene, wie es etwa für Karten notwendig ist).
Literatur
- Meyberg & Vachenauer: Höhere Mathematik 1. Springer-Verlag, Berlin 1995, ISBN 3-540-59188-5, S. 380, 392, 468
- Do Carmo: Differentialgeometrie von Kurven und Flächen, Vieweg-Verlag, 1983
Einzelnachweise
- ↑ R. Walden, W. Vortisch, H. Huck, U. Simon, B. Wegner, R. Roitzsch, W. Wendland: Beweismethoden der Differentialgeometrie im Großen. Springer, Berlin Heidelberg 2006, ISBN 3-540-46990-7, §3 Spezielle Flächenklassen, S. 26 (Erstausgabe: 1973).










