チェビシェフフィルタ (英 : Chebyshev filter )は、フィルタ の一種で、バターワースフィルタ に比べてロールオフが急勾配で、通過帯域 にリップル (en) がある場合(第一種)と除去帯域にリップルがある場合(第二種)がある。チェビシェフフィルタは、理想的なフィルタ特性と実装との間で誤差を最小化するという特徴を持つが、通過帯域にリップルがある。その数学的特性がチェビシェフ多項式 から導き出されたものであることから、パフヌティ・チェビシェフ の名を冠せられている。
チェビシェフフィルタには通過帯域のリップルがつきものであるため、方形波など高調波を含む信号については通過帯域の応答特性、特に群遅延特性が劣るチェビシェフフィルタの使用は難しい[ 1] 電圧定在波比 )を保証する作用があるため、他の回路に接続した際にバターワースフィルタなどよりも信号のあばれが少なくなる。[ 2]
また、特定のフィルタ回路 構成を指す用語ではなく、フィルタの応答特性を指す用語であるため、チェビシェフフィルタ特性 (あるいはチェビシェフ特性 )と呼ぶ場合もある。
四次第一種チェビシェフ・ローパス・フィルタ( ϵ = 1 {\displaystyle \epsilon =1} これは、最も一般的なチェビシェフフィルタである。利得(振幅 )応答を角周波数 ω {\displaystyle \omega } n 次のローパスフィルタの特性は以下のようになる。
G n ( ω ) = | H n ( j ω ) | = 1 1 + ϵ 2 T n 2 ( ω ω 0 ) {\displaystyle G_{n}(\omega )=\left|H_{n}(j\omega )\right|={\frac {1}{\sqrt {1+\epsilon ^{2}T_{n}^{2}\left({\frac {\omega }{\omega _{0}}}\right)}}}}
ここで ϵ {\displaystyle \epsilon } ω 0 {\displaystyle \omega _{0}} 遮断周波数 、 T n ( ) {\displaystyle T_{n}()} n 次のチェビシェフ多項式 である。
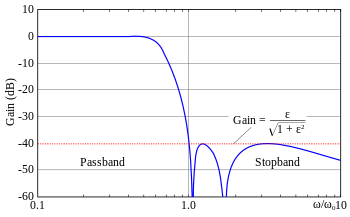
通過帯域は等リップル性を示し、そのリップルはリップル係数 ϵ {\displaystyle \epsilon } G=1 から最小 G = 1 / 1 + ϵ 2 {\displaystyle G=1/{\sqrt {1+\epsilon ^{2}}}} ω 0 {\displaystyle \omega _{0}} 1 / 1 + ϵ 2 {\displaystyle 1/{\sqrt {1+\epsilon ^{2}}}} dB となる周波数だが、チェビシェフフィルタでは成り立たない。
チェビシェフフィルタの次数は、アナログ回路 でフィルタを実装したときのリアクタンス 部品(コイル など)の個数に等しい。
リップルはdB で与えられることが多い。
リップル(dB) = 20 log 10 1 1 + ϵ 2 {\displaystyle 20\log _{10}{\frac {1}{\sqrt {1+\epsilon ^{2}}}}}
したがって、 ϵ = 1 {\displaystyle \epsilon =1}
複素平面の j ω {\displaystyle j\omega } 楕円フィルタ と呼ぶ。
八次第一種チェビシェフフィルタ(ε=0.1、 ω 0 = 1 {\displaystyle \omega _{0}=1} 単純化するため、遮断周波数を単位元に等しいとする。チェビシェフフィルタの利得の極 ( ω p m ) {\displaystyle (\omega _{pm})} s を使うと、次が成り立つ場合である。
1 + ϵ 2 T n 2 ( − j s ) = 0 {\displaystyle 1+\epsilon ^{2}T_{n}^{2}(-js)=0}
− j s = cos ( θ ) {\displaystyle -js=\cos(\theta )}
1 + ϵ 2 T n 2 ( cos ( θ ) ) = 1 + ϵ 2 cos 2 ( n θ ) = 0 {\displaystyle 1+\epsilon ^{2}T_{n}^{2}(\cos(\theta ))=1+\epsilon ^{2}\cos ^{2}(n\theta )=0}
これを θ {\displaystyle \theta }
θ = 1 n arccos ( ± j ϵ ) + m π n {\displaystyle \theta ={\frac {1}{n}}\arccos \left({\frac {\pm j}{\epsilon }}\right)+{\frac {m\pi }{n}}}
となる。アークコサインの複数の値は整数インデックス m を使って明示される。したがってチェビシェフ利得関数の極は次のようになる。
s p m = j cos ( θ ) {\displaystyle s_{pm}=j\cos(\theta )\,}
= j cos ( 1 n arccos ( ± j ϵ ) + m π n ) {\displaystyle =j\cos \left({\frac {1}{n}}\arccos \left({\frac {\pm j}{\epsilon }}\right)+{\frac {m\pi }{n}}\right)}
三角関数と双曲線関数の特性を使うと、これを以下の複素形式で書くことができる。
s p m ± = ± sinh ( 1 n a r c s i n h ( 1 ϵ ) ) sin ( θ m ) {\displaystyle s_{pm}^{\pm }=\pm \sinh \left({\frac {1}{n}}\mathrm {arcsinh} \left({\frac {1}{\epsilon }}\right)\right)\sin(\theta _{m})}
+ j cosh ( 1 n a r c s i n h ( 1 ϵ ) ) cos ( θ m ) {\displaystyle +j\cosh \left({\frac {1}{n}}\mathrm {arcsinh} \left({\frac {1}{\epsilon }}\right)\right)\cos(\theta _{m})}
ここで m=1,2,...n であり、
θ m = π 2 2 m − 1 n {\displaystyle \theta _{m}={\frac {\pi }{2}}\,{\frac {2m-1}{n}}}
である。これは θ n {\displaystyle \theta _{n}} s 平面上で s=0 を中心とする楕円上に並ぶことがわかる。このとき、実数軸の径の長さは sinh ( a r c s i n h ( 1 / ϵ ) / n ) {\displaystyle \sinh(\mathrm {arcsinh} (1/\epsilon )/n)} cosh ( a r c s i n h ( 1 / ϵ ) / n ) {\displaystyle \cosh(\mathrm {arcsinh} (1/\epsilon )/n)}
上記の式で利得 G の極が得られる。それぞれの複素極について、複素共役な極があり、それらの対となる極の符号を反転させた別の極の対も存在する(つまり、実数軸と虚数軸を対称軸として4つの極が対称な位置にある)。伝達関数 は安定でなければならないので、その極は利得の極のうち実数部が負のものであり、複素周波数平面の左半分に存在する。伝達関数は次のようになる。
H ( s ) = ∏ m = 0 n − 1 1 ( s − s p m − ) {\displaystyle H(s)=\prod _{m=0}^{n-1}{\frac {1}{(s-s_{pm}^{-})}}}
ここで s p m − {\displaystyle s_{pm}^{-}}
(次節の図のように) ω {\displaystyle \omega }
五次第一種チェビシェフフィルタ(ε=0.5)の利得と群遅延 群遅延 は位相を角周波数について微分したものと定義され、信号に含まれる異なる周波数成分の位相差による歪みの尺度である。
τ g = − d d ω arg ( H ( j ω ) ) {\displaystyle \tau _{g}=-{\frac {d}{d\omega }}\arg(H(j\omega ))}
左図は ε=0.5 の五次第一種チェビシェフフィルタの利得と群遅延を示したものである。通過帯域では利得にも群遅延にもリップルがあるが、除去帯域にはそれがないことがわかる。
五次第二種チェビシェフ・ローパス・フィルタ( ϵ = 0.01 {\displaystyle \epsilon =0.01} 第二種チェビシェフフィルタは逆チェビシェフフィルタ とも呼ばれる。第一種と同程度に素早くロールオフさせるにはより多くの部品を必要とするため、あまり使われない。通過帯域にはリップルがないが、除去帯域には等リップル性がある。利得は次の通り。
G n ( ω , ω 0 ) = 1 1 + 1 ϵ 2 T n 2 ( ω 0 / ω ) {\displaystyle G_{n}(\omega ,\omega _{0})={\frac {1}{\sqrt {1+{\frac {1}{\epsilon ^{2}T_{n}^{2}\left(\omega _{0}/\omega \right)}}}}}}
除去帯域ではチェビシェフ多項式は 0 と 1 の間で振動するため、利得も 0 と
1 1 + 1 ϵ 2 {\displaystyle {\frac {1}{\sqrt {1+{\frac {1}{\epsilon ^{2}}}}}}}
の間で振動する。そして、この最大値となる最小周波数は遮断周波数 ω 0 {\displaystyle \omega _{0}} dB で表したものと関係し、次の式が成り立つ。
ϵ = 1 10 0.1 γ − 1 {\displaystyle \epsilon ={\frac {1}{\sqrt {10^{0.1\gamma }-1}}}}
5dB の除去帯域減衰率なら ε = 0.6801、10dB なら ε = 0.3333 である。周波数 fC = ωC /2 π は遮断周波数である。3dB周波数 fH と fC は次のような関係にある。
f H = f C cosh ( 1 n cosh − 1 1 ϵ ) {\displaystyle f_{H}=f_{C}\cosh \left({\frac {1}{n}}\cosh ^{-1}{\frac {1}{\epsilon }}\right)}
八次第二種チェビシェフフィルタ(ε=0.1、 ω 0 = 1 {\displaystyle \omega _{0}=1} ここでも遮断周波数は単位元に等しいとする。チェビシェフフィルタの利得の極 ( ω p m ) {\displaystyle (\omega _{pm})}
1 + ϵ 2 T n 2 ( − 1 / j s p m ) = 0 {\displaystyle 1+\epsilon ^{2}T_{n}^{2}(-1/js_{pm})=0}
第二種チェビシェフフィルタの利得の極は第一種フィルタの極の逆数となる。
1 s p m ± = ± sinh ( 1 n a r c s i n h ( 1 ϵ ) ) sin ( θ m ) {\displaystyle {\frac {1}{s_{pm}^{\pm }}}=\pm \sinh \left({\frac {1}{n}}\mathrm {arcsinh} \left({\frac {1}{\epsilon }}\right)\right)\sin(\theta _{m})} + j cosh ( 1 n a r c s i n h ( 1 ϵ ) ) cos ( θ m ) {\displaystyle \qquad +j\cosh \left({\frac {1}{n}}\mathrm {arcsinh} \left({\frac {1}{\epsilon }}\right)\right)\cos(\theta _{m})}
ここで m=1,2,...,n である。第二種チェビシェフフィルタの零点 ( ω z m ) {\displaystyle (\omega _{zm})}
ϵ 2 T n 2 ( − 1 / j s z m ) = 0 {\displaystyle \epsilon ^{2}T_{n}^{2}(-1/js_{zm})=0}
したがって第二種チェビシェフフィルタの零点は、チェビシェフ多項式の零点の逆数となる。
1 / s z m = − j cos ( π 2 2 m − 1 n ) {\displaystyle 1/s_{zm}=-j\cos \left({\frac {\pi }{2}}\,{\frac {2m-1}{n}}\right)}
ここで m=1,2,...,n である。
伝達関数は利得関数の左半分の平面にある極で与えられる。また、零点も同じだが多重度は1になる。
五次第二種チェビシェフフィルタ(ε=0.1)の利得と群遅延 左図は ε=0.1 の五次第二種チェビシェフフィルタの利得 と群遅延 を示したものである。利得を見ると除去帯域にリップルがあるが、通過帯域には見られない。
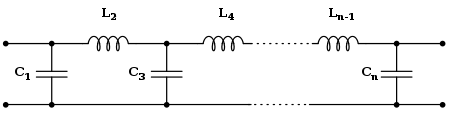
受動回路でローパス のチェビシェフフィルタを実装するには、Cauer形のトポロジーを使う。n 次チェビシェフフィルタのコイルとコンデンサの値は以下の式で計算できる。
G 1 = 2 A 1 cosh ( f H ) Y {\displaystyle G_{1}={\frac {2A_{1}\cosh(f_{H})}{Y}}}
G k = 4 A k − 1 A k cosh 2 ( f H ) B k − 1 G k − 1 {\displaystyle G_{k}={\frac {4A_{k-1}A_{k}\cosh ^{2}(f_{H})}{B_{k-1}G_{k-1}}}}
G1 、Gk はコイルとコンデンサの値を意味する。fH は3dB周波数であり、 f H = f C cosh ( 1 n cosh − 1 1 ϵ ) {\displaystyle f_{H}=f_{C}\cosh \left({\frac {1}{n}}\cosh ^{-1}{\frac {1}{\epsilon }}\right)} k 、Bk は以下の式で計算できる。
Y = sinh ( β 2 n ) {\displaystyle Y=\sinh({\frac {\beta }{2n}})}
β = ln ( coth ( R d b / 17.37 ) ) {\displaystyle \beta =\ln {\big (}\coth(R_{db}/17.37){\big )}}
A k = sin ( 2 k − 1 ) π 2 n {\displaystyle A_{k}=\sin {\frac {(2k-1)\pi }{2n}}}
B k = Y 2 + sin 2 ( k π n ) {\displaystyle B_{k}=Y^{2}+\sin ^{2}\left({\frac {k\pi }{n}}\right)}
ここで RdB は通過帯域のリップルをデシベルで表したものである。
Cauer形のバターワースフィルタ 計算された Gk の値は、右図の分流コンデンサか上の線上のコイルの値となる。あるいはコンデンサとコイルを入れ替えた回路でもよい。
例えば
C1 shunt =G1 , L2 top =G2 , ...
あるいは
L1 shunt = G1 , C1 top =G2 , ...
となる。
このようにして得られた回路は正規化ローパスフィルタである。これに周波数変換やインピーダンスのスケーリングを施すと、任意の遮断周波数 や帯域幅 のハイパスフィルタ 、バンドパスフィルタ 、バンドエリミネーションフィルタ が得られる。
多くのアナログのチェビシェフフィルタは、双一次変換 を施すことでデジタル(離散時間)の再帰型フィルタに変換される。しかし、デジタルフィルタ の帯域幅 は有限なので、変換されたチェビシェフフィルタの応答特性には歪みが生じる。代替手法として整合Z変換 を使えば、応答特性に歪みは生じない。
下図はチェビシェフフィルタと他のフィルタの利得を示したものである。いずれも五次のフィルタである。
見ての通り、チェビシェフフィルタはバターワースフィルタ よりも傾斜が急だが、楕円フィルタ ほどではない。ただし、リップルは楕円フィルタよりも少ない。
[脚注の使い方 ]
^ 森 2001 第4章 チェビシェフ型ローパス・フィルタの設計^ 広畑 2003 第10章 信号を選択するフィルタリング技術 センスアップ!
Daniels, Richard W. (1974年). Approximation Methods for Electronic Filter Design . New York: McGraw-Hill. ISBN 0-07-015308-6 Williams, Arthur B.; Taylors, Fred J. (1988), Electronic Filter Design Handbook (2nd ed.), New York: McGraw-Hill, ISBN 0-07-070434-1 A.B.ウィリアムズ、加藤康雄・監(訳)、1985、『電子フィルタ : 回路設計ハンドブック』原著初版訳、マグロウヒル出版〈マグロウヒル電子回路技術シリーズ〉(原著1981年) ISBN 4895010325 森栄二 (2001). LCフィルタの設計&製作 : コイルとコンデンサで作るLPF/HPF/BPF/BRFの実際 . CQ出版社. ISBN 978-4-7898-3272-4 広畑敦 (2003). 周波技術センスアップ101 : 数M〜数百MHzの高周波信号と上手につきあうために . RF design series. CQ出版. ISBN 978-4-7898-3041-6