関数atan2(y , x ) は、点(x , y ) 方向への半直線 (レイ)と、x軸の正の向きとの間の角度θ を返す。ただし、範囲は(−π,π]である y / x {\displaystyle y/x} atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} atan2 (アークタンジェント2 )は、関数の一種。「2つの引数 を取るarctan(アークタンジェント )」という意味である。x軸の正の向きと、点(x , y ) (ただし、(0, 0) ではない)まで伸ばした半直線 (レイ)との間の、ユークリッド平面上における角度として定義される。関数は atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} arctan2 ( y , x ) {\displaystyle \operatorname {arctan2} (y,x)} ラジアン で返ってくる。
関数 atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} プログラミング言語 のFortran (IBM 社が1961年に実装したFORTRAN-IV)において最初に登場した。元々は、角度θ を直交座標系 の(x , y ) から極座標系 の(r , θ ) に変換する際に、正確で一意な値が返ってくることを意図して導入された。また、 atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} 複素数 x + i y {\displaystyle x+iy} 偏角 [ 注釈 1]
関数 atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} −π < θ ≤ π の範囲で、
x = r cos θ y = r sin θ {\displaystyle {\begin{aligned}x&=r\cos \theta \\y&=r\sin \theta \end{aligned}}} (ただし、r > 0θ を返す。
なお、arctanを使って角度θ を求める際に注意すべきことであるが、 r = x 2 + y 2 {\displaystyle r={\sqrt {x^{2}+y^{2}}}}
θ = arctan ( y x ) {\displaystyle \theta =\arctan \left({\frac {y}{x}}\right)} であるということが常に言えるとは限らない。
これは、x > 0x < 0(x , y ) をユークリッド平面上の正しい象限に配置するには、 π {\displaystyle \pi } θ に加算または減算する必要がある[ 1] x およびy の符号の情報がそれぞれ別個に必要とされると言うことであり、もし単にy をx で除算した場合は、その情報が失われてしまうというわけである。その点、atan2は細かいことを気にしなくてもy とx に代入すれば普通に正しい角度を返してくれるので便利である。
関数 atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} θ については、x とy の値を変更しないままでも角度θ に2π の任意の整数倍を加算することが可能であるため、つまり区間をちゃんと設定しないと戻り値の値が曖昧になってしまうため、関数atan2はその主値 として、区間を(−π , π ) としたものが戻り値として返ってくるようになっている(関数arctanの戻り値の区間が(−π / 2 π / 2 θ は符号付き角度であり、反時計回りの角度は正、時計回りは負となる。具体的に言うと、もしy ≥ 0[0, π ] の区間にあり、もしy < 0(−π , 0) の区間にある、と言う感じになるように関数 atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)}
上の図は、角度 θ の値が −π から +π までの場合におけるtangent関数(tan θ )のグラフ。その下に示したのは対応するy /x 座標の符号である。緑の矢印が指し示しているのは atan2(−1, −1) および atan2(1, 1) の結果(戻り値)である。この図の通り、atan2関数は符号によって場合分けすることで角度θ の正しい値を返してくれる。 atan2 関数は、元々は特定のプログラミング言語に実装された関数(サブルーチン )の一つに過ぎなかったが、現在では他の科学技術の分野でもよく使われるものとなっている。その起源は少なくとも、古のプログラミング言語であるFORTRAN のATAN2(Y, X)にまで遡ることができるが[ 2] 現在 [いつ? においては他の現代的なプログラミング言語にも標準的な数学関数ライブラリやパッケージの形で実装されている。例を挙げると、C言語 およびC++ の標準ライブラリ(標準Cライブラリ のmath.hにおけるatan2()関数あるいは標準C++ライブラリ のcmathにおけるstd::atan2()関数)、Java の標準ライブラリ におけるMath.atan2()メソッド、C# /F# /VB.NET などから利用できる.NET の基本クラスライブラリ におけるSystem.Math.Atan2()メソッド[ 3] JavaScript の標準組み込みオブジェクトMath、Python のmathモジュール、Ruby のMathモジュール、Go のmathパッケージ[ 4] Perl を始めとする古いスクリプト言語にも、C言語風のatan2(y, x)関数が実装されていることが多い。
atan2関数が生み出された背景として、単一引数のみを取るアークタンジェント(arctan関数)は正反対の方向を区別できない、と言う使い勝手の悪さがある。例えば、x 軸とベクトル(1, 1) がなす反時計回りの角度を、arctan関数を使って「arctan(1/1) 」のような形で計算した場合、「π/4 ラジアン(つまり度数法で言うと45° )」という答えが返ってくる。しかし、x 軸とベクトル(−1, −1) の間の角度を同様に、「arctan(−1/−1) 」のような形で計算してみると、期待される答えは「−3π/4 ラジアン(−135°)」または「5π/4 ラジアン(225°)」であるにもかかわらず、やっぱり「π/4 ラジアン」が返ってくる。arctan関数の使い勝手の悪さをさらに言うと、x 軸とベクトル(0, y )(ただし、y ≠ 0とする) がなす角度をarctan関数で計算しようとすると、これはarctan(y /0) の評価が必要になるわけだが、こんなことをさせるとコンピューターはゼロ除算のエラーを吐いてバグる。 [要校閲
atan2関数は、2つの変数 y と x から一意なアークタンジェントの値を算出するが、そのとき両変数の正負の符号が、実行結果の象限を決定するために利用される。それに基づいて、アークタンジェントで「y /x atan2(1, 1) = π/4 」 と 「atan2(−1, −1) = −3π/4 」のどちらに分岐するのか、と言ったことを判別している。また、例えば「ゼロ除算のエラーを吐いてバグる」の代わりに「atan2(1, 0) = π/2 」に分岐させるときも、同様の方法で飛ばしている。 [要校閲
もちろん、場合によって必要な象限補正と例外処理をいちいち精査することで、上記の計算を力技で行うことは可能だが、そんなことをするよりも、常に一意な正しい結果を返してくれるような1つの関数が存在した方が便利である。そんな経緯でatan2関数が存在する。atan2 関数は様々な応用(アプリケーション)において有用であり、例えばユークリッド空間上におけるユークリッド点に関して、1つの点から別の点へと至る方向ベクトルを調べるのに便利である。主な用途としては、コンピューターグラフィックス(CG)における回転において、回転行列をオイラー角に変換する際に使われる。 [要校閲
関数 atan2 は複素数 x + y i偏角 関数 arg を適用した時の主値 を計算する。すなわち、atan2(y , x ) = Pr arg(x + y i) = Arg(x + y i) である。偏角は、2π (原点を中心としたちょうど1周の回転に対応)の整数倍を加えたものも同じ角度になるが、atan2 を一意に定義するために範囲 ( − π , π ] {\displaystyle (-\pi ,\pi ]} −π < atan2(y , x ) ≤ π とする。
標準の arctan 関数(値域 (−π/2, π/2) )を用いて、次のように表すことができる:
atan2 ( y , x ) = { arctan ( y x ) if x > 0 , arctan ( y x ) + π if x < 0 and y ≥ 0 , arctan ( y x ) − π if x < 0 and y < 0 , + π 2 if x = 0 and y > 0 , − π 2 if x = 0 and y < 0 , undefined if x = 0 and y = 0. {\displaystyle \operatorname {atan2} (y,x)={\begin{cases}\arctan({\frac {y}{x}})&{\text{if }}x>0,\\\arctan({\frac {y}{x}})+\pi &{\text{if }}x<0{\text{ and }}y\geq 0,\\\arctan({\frac {y}{x}})-\pi &{\text{if }}x<0{\text{ and }}y<0,\\+{\frac {\pi }{2}}&{\text{if }}x=0{\text{ and }}y>0,\\-{\frac {\pi }{2}}&{\text{if }}x=0{\text{ and }}y<0,\\{\text{undefined}}&{\text{if }}x=0{\text{ and }}y=0.\end{cases}}} 重複する4つの半平面を用いたコンパクトな式:
atan2 ( y , x ) = { arctan ( y x ) if x > 0 , π 2 − arctan ( x y ) if y > 0 , − π 2 − arctan ( x y ) if y < 0 , arctan ( y x ) ± π if x < 0 , undefined if x = 0 and y = 0. {\displaystyle \operatorname {atan2} (y,x)={\begin{cases}\arctan \left({\frac {y}{x}}\right)&{\text{if }}x>0,\\{\frac {\pi }{2}}-\arctan \left({\frac {x}{y}}\right)&{\text{if }}y>0,\\-{\frac {\pi }{2}}-\arctan \left({\frac {x}{y}}\right)&{\text{if }}y<0,\\\arctan \left({\frac {y}{x}}\right)\pm \pi &{\text{if }}x<0,\\{\text{undefined}}&{\text{if }}x=0{\text{ and }}y=0.\end{cases}}} アイバーソンの記法 を用いれば、さらにコンパクトな式が可能:
atan2 ( y , x ) {\displaystyle \operatorname {atan2} (y,x)} = arctan ( y x ) [ x ≠ 0 ] + sgn ( y ) ( π [ x < 0 ] + π 2 [ x = 0 ] ) {\displaystyle =\arctan \left({\frac {y}{x}}\right)[x\neq 0]+\operatorname {sgn}(y)\left(\pi [x<0]+{\frac {\pi }{2}}[x=0]\right)} + undefined [ x = 0 ∧ y = 0 ] {\displaystyle +\;{\text{undefined}}\;\![x=0\wedge y=0]} [ 注釈 2]
一見すると条件式 のない数式:
atan2 ( y , x ) = sgn ( x ) 2 arctan ( y x ) + 1 − sgn ( x ) 2 ( 1 + sgn ( y ) − sgn ( y ) 2 ) π {\displaystyle \operatorname {atan2} (y,x)=\operatorname {sgn}(x)^{2}\arctan \left({\frac {y}{x}}\right)+{\frac {1-\operatorname {sgn}(x)}{2}}\left(1+\operatorname {sgn}(y)-\operatorname {sgn}(y)^{2}\right)\pi } タンジェントの半角の公式 から派生した次の式で atan2 を定義することもできる:
atan2 ( y , x ) = { 2 arctan ( y x 2 + y 2 + x ) if x > 0 or y ≠ 0 , π if x < 0 and y = 0 , undefined if x = 0 and y = 0. {\displaystyle \operatorname {atan2} (y,x)={\begin{cases}2\arctan \left({\frac {y}{{\sqrt {x^{2}+y^{2}}}+x}}\right)&{\text{if }}x>0{\text{ or }}y\neq 0,\\\pi &{\text{if }}x<0{\text{ and }}y=0,\\{\text{undefined}}&{\text{if }}x=0{\text{ and }}y=0.\end{cases}}} この式は、上記の定義よりもシンボリックな使用に適している場合がある。ただし、 x 2 + y 2 {\displaystyle {\sqrt {x^{2}+y^{2}}}} x < 0, y = 0浮動小数点数 の計算用途には適していない(これにより、y がゼロで除算されることもある)。
これらの膨らんだ丸め誤差を回避するため、先ほどの式を変形:
atan2 ( y , x ) = { 2 arctan ( y x 2 + y 2 + x ) if x > 0 , 2 arctan ( x 2 + y 2 − x y ) if x ≤ 0 and y ≠ 0 , π if x < 0 and y = 0 , undefined if x = 0 and y = 0. {\displaystyle \operatorname {atan2} (y,x)={\begin{cases}2\arctan \left({\frac {y}{{\sqrt {x^{2}+y^{2}}}+x}}\right)&{\text{if }}x>0,\\2\arctan \left({\frac {{\sqrt {x^{2}+y^{2}}}-x}{y}}\right)&{\text{if }}x\leq 0{\text{ and }}y\neq 0,\\\pi &{\text{if }}x<0{\text{ and }}y=0,\\{\text{undefined}}&{\text{if }}x=0{\text{ and }}y=0.\end{cases}}} 偏角の主値の導出は、この図を参照している。 注意:
これにより、範囲 (−π, π] の結果が生成される。[ 注釈 3] 上記のように、偏角の主値 atan2(y , x ) は、三角法によって arctan(y /x ) に関連付けることができる。 導出は次のようになる: (x , y ) = (r cos θ , r sin θ ) のとき tan(θ /2) = y / (r + x ) となる。その結果、次式が成立する。 atan2 ( y , x ) = θ = 2 θ / 2 = 2 arctan y x 2 + y 2 + x . {\displaystyle {\text{atan2}}(y,x)=\theta =2\,\theta /2=2\arctan {\frac {y}{{\sqrt {x^{2}+y^{2}}}+x}}.} 問題の領域は √ x 2 y 2 x ≠ 0
詳細は「回転数 (数学)」を参照
関数 atan2 は2変数関数であるため、2つの偏導関数 がある。これらの導関数が存在する点では、atan2 は定数項を除いた arctan(y /x ) に等しくなる。したがって、x > 0y ≠ 0
∂ ∂ x atan2 ( y , x ) = ∂ ∂ x arctan ( y x ) = − y x 2 + y 2 , ∂ ∂ y atan2 ( y , x ) = ∂ ∂ y arctan ( y x ) = x x 2 + y 2 . {\displaystyle {\begin{aligned}&{\frac {\partial }{\partial x}}\operatorname {atan2} (y,\,x)={\frac {\partial }{\partial x}}\arctan \left({\frac {y}{x}}\right)=-{\frac {y}{x^{2}+y^{2}}},\\[5pt]&{\frac {\partial }{\partial y}}\operatorname {atan2} (y,\,x)={\frac {\partial }{\partial y}}\arctan \left({\frac {y}{x}}\right)={\frac {x}{x^{2}+y^{2}}}.\end{aligned}}} したがって、atan2 の勾配は次式で与えられる。
∇ atan2 ( y , x ) = ( − y x 2 + y 2 , x x 2 + y 2 ) . {\displaystyle \nabla {\text{atan2}}(y,x)=\left({-y \over x^{2}+y^{2}},\ {x \over x^{2}+y^{2}}\right).} 関数 atan2 を角度関数 θ (x , y ) = atan2(y , x )全微分 について次の式が得られる:
d θ = ∂ ∂ x atan2 ( y , x ) d x + ∂ ∂ y atan2 ( y , x ) d y = − y x 2 + y 2 d x + x x 2 + y 2 d y . {\displaystyle {\begin{aligned}\mathrm {d} \theta &={\frac {\partial }{\partial x}}\operatorname {atan2} (y,\,x)\,\mathrm {d} x+{\frac {\partial }{\partial y}}\operatorname {atan2} (y,\,x)\,\mathrm {d} y\\[5pt]&=-{\frac {y}{x^{2}+y^{2}}}\,\mathrm {d} x+{\frac {x}{x^{2}+y^{2}}}\,\mathrm {d} y.\end{aligned}}} 関数 atan2 は、負の x 軸に沿って不連続であるが、角度を連続的に定義できないという事実を反映して、この導関数は原点を除いて連続的に定義される。これは、角度の微小な(そして実際には局所的な)変化 が原点を除くすべての場所で定義できるという事実を反映している。この導関数をパスに沿って積分するとパス全体の角度が全体的に変化し、閉ループで積分すると回転数が得られる。
微分幾何学 の言語では、この導関数は1-形式 であり、閉 である(導関数が0である)が、完全 ではない(0-形式の導関数、つまり関数ではない)。実際、1点を除いた平面(Punctured Plane)の1次のド・ラームコホモロジー を生成する。これはそのような形式の最も基本的な例であり、微分幾何学の基本である。
atan2 の偏導関数には三角関数が含まれていないため、三角関数の評価にコストがかかる可能性がある多くのアプリケーション(例:組み込みシステム)で特に役立つ。
任意の半直線上のatan2 この図は、ある半直線に沿ったatan2の値を単位円上に示している。atan2の値はラジアンであり、単位円内に記載されている。標準的な数学の方式に従い、角度は右方向の半直線をゼロとして反時計回りに増加する。ここで、2つの引数の順序が座標と比べて入れ替わっていることに注意が必要である。すなわち、関数atan2(y , x ) は座標(x , y ) に対応する角度を計算する。
アークタンジェント とatan2関数の比較この図は arctan ( tan ( θ ) ) {\displaystyle \arctan(\tan(\theta ))} 0 ≤ θ ≤ 2 π {\displaystyle 0\leq \theta \leq 2\pi } atan2 ( sin ( θ ) , cos ( θ ) ) {\displaystyle \operatorname {atan2} (\sin(\theta ),\cos(\theta ))} 奇関数 であり、それぞれ π {\displaystyle \pi } 2 π {\displaystyle 2\pi } θ {\displaystyle \theta } atan2 {\displaystyle \operatorname {atan2} } θ = π {\displaystyle \theta =\pi } 分岐截断 、および arctan {\displaystyle \arctan } θ ∈ { π 2 , 3 π 2 } {\displaystyle \theta \in \{{\tfrac {\pi }{2}},\;{\tfrac {3\pi }{2}}\}} [ 5]
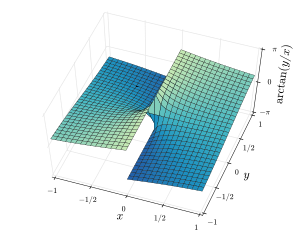
下記の2つの図は、atan2(y , x ) およびarctan(y / x の上から見た3次元図である。ここで、atan2(y , x ) におけるX /Y 平面の原点から伸びる半直線が定数値なのに対し、arctan(y / x ではX /Y 平面の原点を通る直線が定数値である。x > 0
atan2 {\displaystyle \operatorname {atan2} }
atan2 ( y 1 , x 1 ) ± atan2 ( y 2 , x 2 ) = atan2 ( y 1 x 2 ± y 2 x 1 , x 1 x 2 ∓ y 1 y 2 ) {\displaystyle \operatorname {atan2} (y_{1},x_{1})\pm \operatorname {atan2} (y_{2},x_{2})=\operatorname {atan2} (y_{1}x_{2}\pm y_{2}x_{1},x_{1}x_{2}\mp y_{1}y_{2})} ...ここで atan2 ( y 1 , x 1 ) ± atan2 ( y 2 , x 2 ) ∈ ( − π , π ] {\displaystyle \operatorname {atan2} (y_{1},x_{1})\pm \operatorname {atan2} (y_{2},x_{2})\in (-\pi ,\pi ]}
証明には、 y 2 ≠ 0 {\displaystyle y_{2}\neq 0} x 2 > 0 {\displaystyle x_{2}>0} y 2 = 0 {\displaystyle y_{2}=0} x 2 < 0 {\displaystyle x_{2}<0} y 2 ≠ 0 {\displaystyle y_{2}\neq 0} x 2 > 0 {\displaystyle x_{2}>0}
− atan2 ( y , x ) = atan2 ( − y , x ) {\displaystyle -\operatorname {atan2} (y,x)=\operatorname {atan2} (-y,x)} y ≠ 0 {\displaystyle y\neq 0} x > 0 {\displaystyle x>0} Arg ( x + i y ) = atan2 ( y , x ) {\displaystyle \operatorname {Arg} (x+iy)=\operatorname {atan2} (y,x)} Arg {\displaystyle \operatorname {Arg} } 複素数の偏角の数値計算 である。 θ ∈ ( − π , π ] {\displaystyle \theta \in (-\pi ,\pi ]} θ = Arg e i θ {\displaystyle \theta =\operatorname {Arg} e^{i\theta }} オイラーの公式 により)。 Arg ( e i Arg ζ 1 e i Arg ζ 2 ) = Arg ( ζ 1 ζ 2 ) {\displaystyle \operatorname {Arg} (e^{i\operatorname {Arg} \zeta _{1}}e^{i\operatorname {Arg} \zeta _{2}})=\operatorname {Arg} (\zeta _{1}\zeta _{2})} (4)において、複素数の偏角の定理 により e i Arg ζ = ζ ¯ {\displaystyle e^{i\operatorname {Arg} \zeta }={\bar {\zeta }}} ζ ¯ = ζ / | ζ | {\displaystyle {\bar {\zeta }}=\zeta /\left|\zeta \right|} Arg ( e i Arg ζ 1 e i Arg ζ 2 ) = Arg ( ζ 1 ¯ ζ 2 ¯ ) {\displaystyle \operatorname {Arg} (e^{i\operatorname {Arg} \zeta _{1}}e^{i\operatorname {Arg} \zeta _{2}})=\operatorname {Arg} ({\bar {\zeta _{1}}}{\bar {\zeta _{2}}})} a {\displaystyle a} Arg ζ = Arg a ζ {\displaystyle \operatorname {Arg} \zeta =\operatorname {Arg} a\zeta } ζ = ζ 1 ζ 2 {\displaystyle \zeta =\zeta _{1}\zeta _{2}} a = 1 | ζ 1 | | ζ 2 | {\displaystyle a={\frac {1}{\left|\zeta _{1}\right|\left|\zeta _{2}\right|}}} Arg ( ζ 1 ¯ ζ 2 ¯ ) = Arg ( ζ 1 ζ 2 ) {\displaystyle \operatorname {Arg} ({\bar {\zeta _{1}}}{\bar {\zeta _{2}}})=\operatorname {Arg} (\zeta _{1}\zeta _{2})}
上記より、次の等式が成り立つ:
atan2 ( y 1 , x 1 ) ± atan2 ( y 2 , x 2 ) = atan2 ( y 1 , x 1 ) + atan2 ( ± y 2 , x 2 ) by (1) = Arg ( x 1 + i y 1 ) + Arg ( x 2 ± i y 2 ) by (2) = Arg e i ( Arg ( x 1 + i y 1 ) + Arg ( x 2 ± i y 2 ) ) by (3) = Arg ( e i Arg ( x 1 + i y 1 ) e i Arg ( x 2 ± i y 2 ) ) = Arg ( ( x 1 + i y 1 ) ( x 2 ± i y 2 ) ) by (4) = Arg ( x 1 x 2 ∓ y 1 y 2 + i ( y 1 x 2 ± y 2 x 1 ) ) = atan2 ( y 1 x 2 ± y 2 x 1 , x 1 x 2 ∓ y 1 y 2 ) by (2) {\displaystyle {\begin{aligned}\operatorname {atan2} (y_{1},x_{1})\pm \operatorname {atan2} (y_{2},x_{2})&{}=\operatorname {atan2} (y_{1},x_{1})+\operatorname {atan2} (\pm y_{2},x_{2})&{\text{by (1)}}\\&{}=\operatorname {Arg} (x_{1}+iy_{1})+\operatorname {Arg} (x_{2}\pm iy_{2})&{\text{by (2)}}\\&{}=\operatorname {Arg} e^{i(\operatorname {Arg} (x_{1}+iy_{1})+\operatorname {Arg} (x_{2}\pm iy_{2}))}&{\text{by (3)}}\\&{}=\operatorname {Arg} (e^{i\operatorname {Arg} (x_{1}+iy_{1})}e^{i\operatorname {Arg} (x_{2}\pm iy_{2})})\\&{}=\operatorname {Arg} ((x_{1}+iy_{1})(x_{2}\pm iy_{2}))&{\text{by (4)}}\\&{}=\operatorname {Arg} (x_{1}x_{2}\mp y_{1}y_{2}+i(y_{1}x_{2}\pm y_{2}x_{1}))\\&{}=\operatorname {atan2} (y_{1}x_{2}\pm y_{2}x_{1},x_{1}x_{2}\mp y_{1}y_{2})&{\text{by (2)}}\end{aligned}}} Corollary(推論) : もし ( y 1 , x 1 ) {\displaystyle (y_{1},x_{1})} ( y 2 , x 2 ) {\displaystyle (y_{2},x_{2})} atan2 {\displaystyle \operatorname {atan2} } ( − π , π ] {\displaystyle (-\pi ,\pi ]}
a t a n 2 {\displaystyle \mathrm {atan2} } 風向 は a t a n 2 {\displaystyle \mathrm {atan2} } [ 6] 太陽の方位角(英語版) も東および北方向の成分を引数として用いている。風向きは通常北-時計回りで定義されているためであり、太陽の方位角は北-時計回り および 南-時計回り両方を用いて広く計算されていためである。[ 7]
a t a n 2 ( y , x ) , {\displaystyle \mathrm {atan2} (y,x),\;\;\;\;\;} a t a n 2 ( x , y ) , {\displaystyle \mathrm {atan2} (x,y),\;\;\;\;\;} a t a n 2 ( − x , − y ) {\displaystyle \mathrm {atan2} (-x,-y)} 例として、 x 0 = 3 2 {\displaystyle x_{0}={\frac {\sqrt {3}}{2}}} y 0 = 1 2 {\displaystyle y_{0}={\frac {1}{2}}} a t a n 2 ( y 0 , x 0 ) ⋅ 180 π = 30 ∘ {\displaystyle \mathrm {atan2} (y_{0},x_{0})\cdot {\frac {180}{\pi }}=30^{\circ }} a t a n 2 ( x 0 , y 0 ) ⋅ 180 π = 60 ∘ {\displaystyle \mathrm {atan2} (x_{0},y_{0})\cdot {\frac {180}{\pi }}=60^{\circ }} a t a n 2 ( − x 0 , − y 0 ) ⋅ 180 π = − 120 ∘ {\displaystyle \mathrm {atan2} (-x_{0},-y_{0})\cdot {\frac {180}{\pi }}=-120^{\circ }}
x/y成分の符号の変更と位置の転換は結果として8つの a t a n 2 {\displaystyle \mathrm {atan2} } 方角 ・東西南北を始点とする。
atan2の実装はプログラミング言語ごとに異なる。
入れ替わった順序の引数 ( Im , Re ) {\displaystyle (\operatorname {Im} ,\operatorname {Re} )}
C言語のatan2関数を始めとする多くのプログラミング言語では、直交座標系 から極座標系 への変換の手間を減らすため、引数は入れ替わったものが使われており、atan2(0, 0)も定義されている。実装においては−0 を除外している、あるいは+0が引数に指定された場合には単純にゼロと定義している。関数は常に[−π, π] の間の値を返し、エラーやNaN (Not a Number)を返すことはしない。 Common Lisp では引数の数は可変なので、atan関数は1つの場合とx 座標を付加した(atan y x )が定義されている。[ 13] Juliaでは、Common Lispと状況が似ており、atan2の代わりに、1引数形式と2引数形式のatanを持っている[ 14] [ 15] [ 注釈 4] Intel アーキテクチャのx87 命令では、 atan2はFPATAN (floating-point partial arctangent) 命令で実装される。[ 16] [−π, π] の値となる。例えば、有限のx に対し、atan2(∞, x ) = +π /2となる。特に両方の引数がゼロである時、FPATANは下記のようになる: atan2(+0, +0) = +0;atan2(+0, −0) = +π ;atan2(−0, +0) = −0;atan2(−0, −0) = −π .この定義は-0 の定義に従ったものとなる。 コード以外での学術論文などの数学的表記では、通常の arctanおよびtan−1 の最初の1文字を大文字にしたArctan [ 17] Tan−1 [ 18] 複素数の偏角 と同様で、Atan(y , x ) = Arg(x + i y ) となる。 シンボリック算術をサポートする実装系では通常、atan2(0, 0) は不定値あるいはエラーを返す。 -0 、無限大 やNaN をサポートする実装系(例:IEEE 754 )では、−π and −0を含む値を返すように拡張されている場合がある。これら実装系では、NaNが入力された時にNaNあるいは例外を返すよう実装されていることも多い。-0 をサポートする実装系(例:IEEE 754 )では、atan2(y, x) の実装が−0の入力を的確に処理できない場合、atan2(−0, x ) , x < 0 の時に−π を返すリスクがある。netlib で公開されているフリーの算術ライブラリであるFDLIBM (Freely Distributable LIBM)では、atan2のソースコードが公開されており、IEEEの例外値の対処方法を確認することができる。ハードウェアによる乗算器を持たない実装系では、atan2 関数はCORDIC(英語版) による数値的に十分な近似により実装されている。よってatan(y ) の実装もatan2(y , 1) の実装を用いている場合がある。
[脚注の使い方 ]
^ 「位相」とも言う。 ^ 従って undefined ⋅ 0 = 0 , {\displaystyle {\text{undefined}}\cdot 0=0,} undefined ⋅ 1 = undefined {\displaystyle {\text{undefined}}\cdot 1={\text{undefined}}} z + undefined = undefined {\displaystyle z+{\text{undefined}}={\text{undefined}}} z . {\displaystyle z.} ^ 結果の周期性を適用して、別の目的の範囲に写像できる。e.g. 負の結果に 2π を加算すると [0, 2π) に写像できる。 ^ "Why don't you compile Matlab/Python/R/… code to Julia?" のセクションを参照のこと。
^ http://scipp.ucsc.edu/~haber/ph116A/arg_11.pdf ^ Organick, Elliott I. (1966). A FORTRAN IV Primer . Addison-Wesley. pp. 42. "Some processors also offer the library function called ATAN2, a function of two arguments (opposite and adjacent)." ^ Math.Atan2(Double, Double) Method (System) | Microsoft Learn ^ “src/math/atan2.go”. The Go Programming Language . 20 April 2018 閲覧。 ^ “Wolf Jung: Mandel, software for complex dynamics”. www.mndynamics.com . 20 April 2018 閲覧。 ^ Wind Direction Quick Reference, NCAR UCAR Earth Observing Laboratory. https://www.eol.ucar.edu/content/wind-direction-quick-reference ^ Zhang, Taiping; Stackhouse, Paul W.; MacPherson, Bradley; Mikovitz, J. Colleen (2021). “A solar azimuth formula that renders circumstantial treatment unnecessary without compromising mathematical rigor: Mathematical setup, application and extension of a formula based on the subsolar point and atan2 function”. Renewable Energy 172 : 1333–1340. doi:10.1016/j.renene.2021.03.047. ^ “Microsoft Excel Atan2 Method”. Microsoft. 9 Jan 2022 閲覧。 ^ “LibreOffice Calc ATAN2”. Libreoffice.org. 9 Jan 2022 閲覧。 ^ “Functions and formulas – Docs Editors Help”. support.google.com . 9 Jan 2022 閲覧。 ^ “Numbers' Trigonometric Function List”. Apple. 9 Jan 2022 閲覧。 ^ “ANSI SQL:2008 standard”. Teradata. 2015年8月20日時点のオリジナルよりアーカイブ。9 Jan 2022 閲覧。 ^ “CLHS: Function ASIN, ACOS, ATAN”. LispWorks. 9 Jan 2022 閲覧。 ^ “Mathematics · The Julia Language”. docs.julialang.org . 9 Jan 2022 閲覧。 ^ “Frequently Asked Questions · The Julia Language”. docs.julialang.org . 9 Jan 2022 閲覧。 ^ IA-32 Intel Architecture Software Developer’s Manual. Volume 2A: Instruction Set Reference, A-M, 2004. ^ Burger, Wilhelm; Burge, Mark J. (7 July 2010). Principles of Digital Image Processing: Fundamental Techniques . Springer Science & Business Media. ISBN 978-1-84800-191-6. https://books.google.com/books?id=2LIMMD9FVXkC&q=four+quadrant+inverse+tangent+mathematical+notation&pg=PA234 20 April 2018 閲覧。 ^ Glisson, Tildon H. (18 February 2011). Introduction to Circuit Analysis and Design . Springer Science & Business Media. ISBN 9789048194438. https://books.google.com/books?id=7nNjaH9B0_0C&q=four+quadrant+inverse+tangent+mathematical+notation&pg=PA345 20 April 2018 閲覧。
ATAN2 Online calculator atan2 at Everything2 PicBasic Pro solution atan2 for a PIC18F その他のatan2の実装・コード Bearing Between Two Points Arctan and Polar Coordinates What's 'Arccos'? 










![{\displaystyle (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c)


![{\displaystyle =\arctan \left({\frac {y}{x}}\right)[x\neq 0]+\operatorname {sgn}(y)\left(\pi [x<0]+{\frac {\pi }{2}}[x=0]\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/021d7084cff81b574a26d5feccd9b8e4acecfd42)
![{\displaystyle +\;{\text{undefined}}\;\![x=0\wedge y=0]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ce1d61f2336b174a416930283d9ef3e774f8af23)






![{\displaystyle {\begin{aligned}&{\frac {\partial }{\partial x}}\operatorname {atan2} (y,\,x)={\frac {\partial }{\partial x}}\arctan \left({\frac {y}{x}}\right)=-{\frac {y}{x^{2}+y^{2}}},\\[5pt]&{\frac {\partial }{\partial y}}\operatorname {atan2} (y,\,x)={\frac {\partial }{\partial y}}\arctan \left({\frac {y}{x}}\right)={\frac {x}{x^{2}+y^{2}}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5667ec2b3721b753e36169b4a2e7865a5fc19f24)

![{\displaystyle {\begin{aligned}\mathrm {d} \theta &={\frac {\partial }{\partial x}}\operatorname {atan2} (y,\,x)\,\mathrm {d} x+{\frac {\partial }{\partial y}}\operatorname {atan2} (y,\,x)\,\mathrm {d} y\\[5pt]&=-{\frac {y}{x^{2}+y^{2}}}\,\mathrm {d} x+{\frac {x}{x^{2}+y^{2}}}\,\mathrm {d} y.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/597be2d8f10864e4f2fd6c034658cd872e530376)













![{\displaystyle \operatorname {atan2} (y_{1},x_{1})\pm \operatorname {atan2} (y_{2},x_{2})\in (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c8ac7a65a211b052d2463aea3180ef7f999f35d)









![{\displaystyle \theta \in (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2742d923047f035ec3e8db8259485fda0629104b)



































